ミリ波レーダーの概要
ミリ波レーダーは、移動系ロボットの障害物検知で使われる重要なセンサーです。高級車を中心に市販の自動車への搭載されていて実用化が進んでおり、今後は自動運転システムや運転支援システムにとって欠かせないセンサーになると言われています。自動車以外でも、ドローンや搬送装置(AGV、AWR)などの移動系ロボットに搭載されています。また、ブルドーザー車などの重機(建機)の自動停止機能といった部分的なロボット機能でも使われています。
ミリ波レーダーとは「ミリ波」という電波(電磁波)を使って障害物の距離を検知するセンサーです。ミリ波は、波長が数 mm 程度(1mm ~ 10mm)の長さの電波のことを指します。「ミリ」メートル程度の波長の電「波」ということで「ミリ波」と名づけられました。周波数で表現すると 30GHz ~ 300GHz の範囲になります。ただし、他の波長帯と同様に厳密な定義ではなく、例えば 20GHz の電波もミリ波と呼ぶことがあります。
レーダーと言いますと、ミリ波よりも波長が長い(周波数が低い)電波を使ったものが船舶や飛行機の障害物探知、雨雲レーダーといった用途で広く使われていますが、ここではあくまでミリ波のレーダーに限定して説明します。
次項から、ミリ波レーダーに関わる基本的な知識と技術に触れながら、全体像を掴んでいきます。
ミリ波レーダーの基本的な機能と構成
ミリ波レーダーは、測距センサーの一種です。得られた距離情報を使って障害物の有無を判定します。例えば、物体までの測定距離が 100m 以下なら障害物が存在すると認定する、といった感じです。方向を限定して(例えば3方向など)各方向での障害物の距離を測定するというパターンと、測定する方向を縦方向と横方向にメッシュ状に区切って距離の画像データを作成するというパターンがあります。
ミリ波レーダーは、電波を照射する送信機能と電波を検出する受信機能で構成されます。基本的な構成図を下記に示します(詳しい構成は後述)。ミリ波を含めた電波の送信と受信には「アンテナ」を使います。送信側は、パワーアンプ(PA)などから構成される送信回路が送信用のアンテナに接続されています。パワーアンプからアンテナに信号波形(サイン波の形)を送ることでアンテナから電波が照射されるという仕組みです。受信側は、低ノイズ増幅器(LNA)などから構成される受信回路が受信用のアンテナに接続されています。アンテナで電波を検出して電圧信号に変換し、低ノイズ増幅器で信号レベルを増幅してその後の信号処理回路へ渡します。
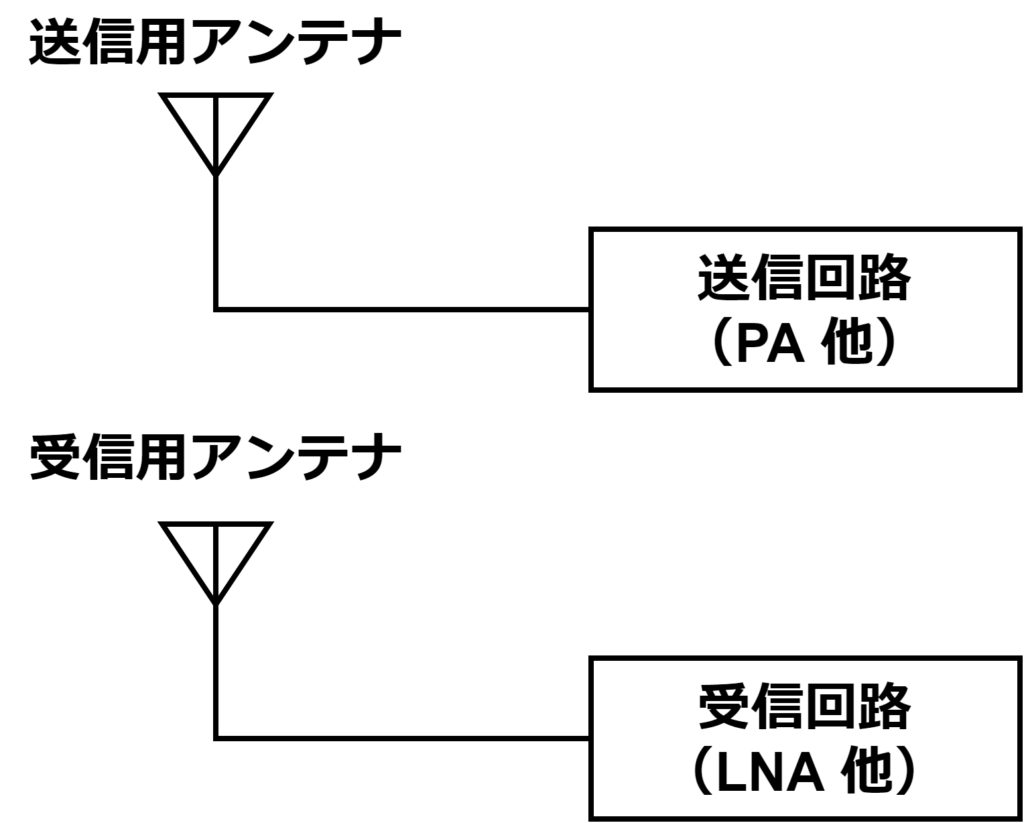
ミリ波レーダーの基本的な動作原理は一般的な無線通信システムと同じ発想に基づいており、回路構成も似たような形になります。無線通信システムによっては、送信と受信で同じアンテナを共有して時間を分けて(時分割で)使うこともありますが、ミリ波レーダーは空間分解能(角度分解能)を上げるための工夫の過程でアンテナを別々に用意することになることが多いようです。
ミリ波レーダーは、対象物にミリ波の電波を照射して跳ね返ってきた電波を検出し、その往復にかかった時間を計測することで対象物までの距離を推定します。距離は、時間と速度の掛け算で求めることができます。電波は光(可視光)と同様に電磁波の一種ですので、ミリ波の速度は「光速」です。対象物までの距離を \(R\)(往復の距離を \(2R\))、時間を \(\Delta T\)、光速を \(c\) とすると、下記の数式が成り立ち、これで距離 \(R\) が求まったことになります。
$$~~2R = \Delta T \times c$$
$$~~R = \frac{\Delta T \times c}{2}$$
このように、電波などの飛行時間から距離を計算する手法を「TOF(Time of Flight)」と呼びます。方式によっては当てはまらないものもありますが、基本的にミリ波レーダーは TOF センサーの一種に分類されます。
ミリ波レーダーの周波数
ミリ波レーダーで利用可能な主な周波数帯は、76GHz 帯(77GHz 帯)、79GHz 帯、24GHz 帯の3つの領域です。一般的な無線通信と同様に(例えば WiFi には 2.4GHz 帯と 5GHz 帯が割り当てられているように)使用可能な周波数が細かく決められています。76GHz と 79GHz の波長は約 4mm で、24GHz の波長は約 12.5mm です。24GHz の波長は厳密にはミリ波の定義の 1~10mm に含まれないことから「準ミリ波」と呼ばれることもあります。
3つの周波数帯は、それぞれ周波数に幅があります。76GHz 帯は 76.0 ~ 77.0GHz、79GHz 帯は 77.0 ~ 81.0GHz、24GHz 帯は 24.05 ~ 24.25GHz の範囲です。この範囲は国ごとに法令で決められており、政府機関によって管理されています。(日本では総務省、アメリカでは連邦通信委員会が管轄しています。)これは、電波を搬送する空間を国民(人類)の共有資産として考え、無法地帯にせずに効率的に使用できるようにするためです。こういった考え方ができるのは、複数の電波が同じ場所で飛び交っていても、周波数を分けてさえいれば送信情報を受信側で選別できるという電波の物理(数学)的な性質に由来します。
周波数に幅を持たせるのは、現実世界で周波数を1点に決めてコントロールするのは不可能というのが1つ目の理由です。(電圧値を 1.500000000V とかにコントロールするのが難しいのと同じようなイメージです。)もう1つの理由は、周波数に幅を持たせた方が効率的に情報を伝送できるからです。例えば、1つの周波数帯をさらにチャンネルと呼ばれる複数の細かな周波数範囲に分割して、複数のチャンネルで同時に別の情報を送信したりします。周波数の範囲が大きいほど(帯域が広いほど)通信速度や測距の精度が高くなるのです。そういう意味では、79GHz 帯は 77~81GHz という 4GHz の範囲を使うことができるため、3つの周波数帯の中では最も精度を高めやすい周波数帯となります。
ミリ波レーダーの長所と短所
自動運転自動車などの屋外を移動するロボットに搭載した場合、ミリ波レーダーの最大の長所は測距の性能が天候の影響を受けにくいことです。例えば人間の目のように可視光を使って前方を視認する際、雨、霧、雪が発生すると障害物を見つけづらくなります。また、可視光では(車のヘッドライトをつけていたとしても)夜間の視認性が大きく損なわれます。ミリ波は可視光や赤外線などの他の測距センサーに使用される電磁波に比べると雨などの水分による減衰が比較的軽微で、悪天候でも測距の機能を維持しやすいという特徴があります。
また、波長が長い(周波数が低い)電波に比べると、波長が短い分だけアンテナのサイズを小さくできるというメリットがあります。電波を効率的に送受信するためには、アンテナのサイズを波長の半分(λ/2)より大きくする必要があると言われており、波長が短いミリ波はアンテナを小さくすることができるのです。波長が短いという特徴から、原理的に距離分解能と空間分解能を小さくでき、測距センサーとしての精度を高めることができる、という長所もあります。
短所は、ステレオカメラや LiDAR などの他の測距センサーに比べて空間分解能(角度分解能)が悪い(大きい)ことです。これは後述します。また、自動運転自動車向けに利用する際には、ガードレールなど対象物以外の物体からのクラッタと呼ばれるノイズが大きくなってしまうという点もデメリットです。
ミリ波レーダーの原理
ミリ波レーダーは TOF センサーの一種だということを前述しましたが、一般的に使われる方式は大きく2つに分かれます。「パルス方式」と「FMCW方式」です。パルス方式は原理が簡単なことから回路構成も比較的シンプルになります。測定する距離や方向に対する精度がそれほど必要ない場合に使われます。FMCW方式は、対象物までの距離と同時に対象物との相対的な移動速度を測定できるという特徴から、自動車の運転支援システムや自動運転システムで広く使われています。
パルス方式
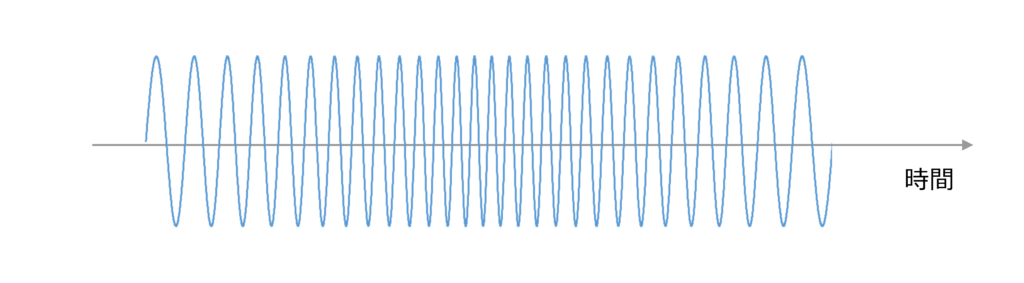
パルス方式は、ミリ波をパルス状に放射する方式です。物体から跳ね返ってきたパルス状の電波を受信し、その時間差から物体までの距離を推定する、という仕組みです。距離と時間の関係式は前述の通りです。送信するパルスと受信するパルスのイメージを下図に示します。
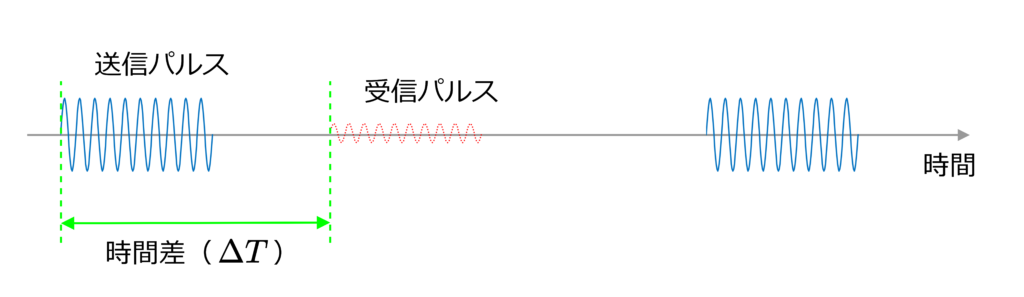
これは、横軸に時間をとって縦軸に電波の強度を表現したものです。見やすくするためにこの図では1回のパルスに含まれるサイン波の数を 10 周期分としていますが、実際にはもっと多くのサイン波が含まれます。また、受信される電波の電力(強度)は送信の電力に比べて何桁も小さく非常に微弱なものになります。これをリアルに図で表現すると受信のパルスが全く見えなくなってしまいますので、誇張して大きめに描いています。
1つのパルスの中に複数のサイン波を含めるのは、受信の感度を高めるためです。1個のサイン波ではノイズとの切り分けの難易度が高くなります。個数が多い方が検出しやすいというのは直観的にも理解できるのではないかと思います。
FMCW方式
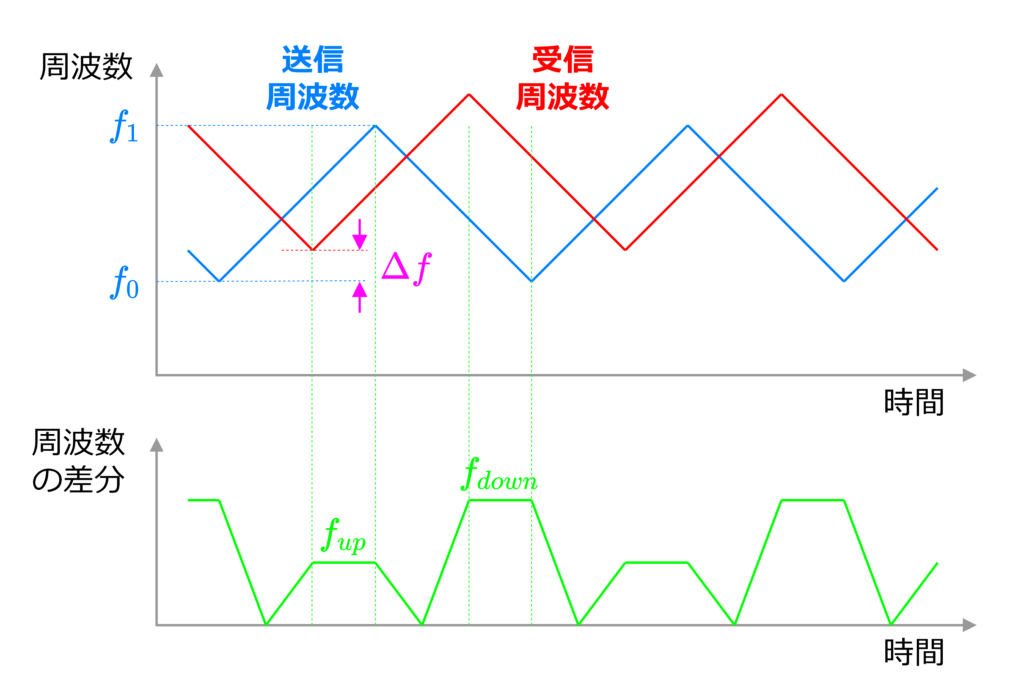
FMCW方式は、放射する電波の周波数を連続的に少しずつ変化させる方式です。FM は周波数変調(Frequency Modulation)の略で、送信情報を周波数の変化で表現する手法のことを指します。ここでの送信情報は、送信部が電波を照射する時刻のことを指します。CW は 連続波(Continuous Wave)の略でパルス方式のように照射する電波が途切れたりせずに連続的に出力される、ということを意味します。放射する電波の周波数の時間変化を表したグラフを下図に示します。物体に当たって跳ね返ってきて受信される電波も、距離に応じた時間差分だけ遅れて同じような形となります。
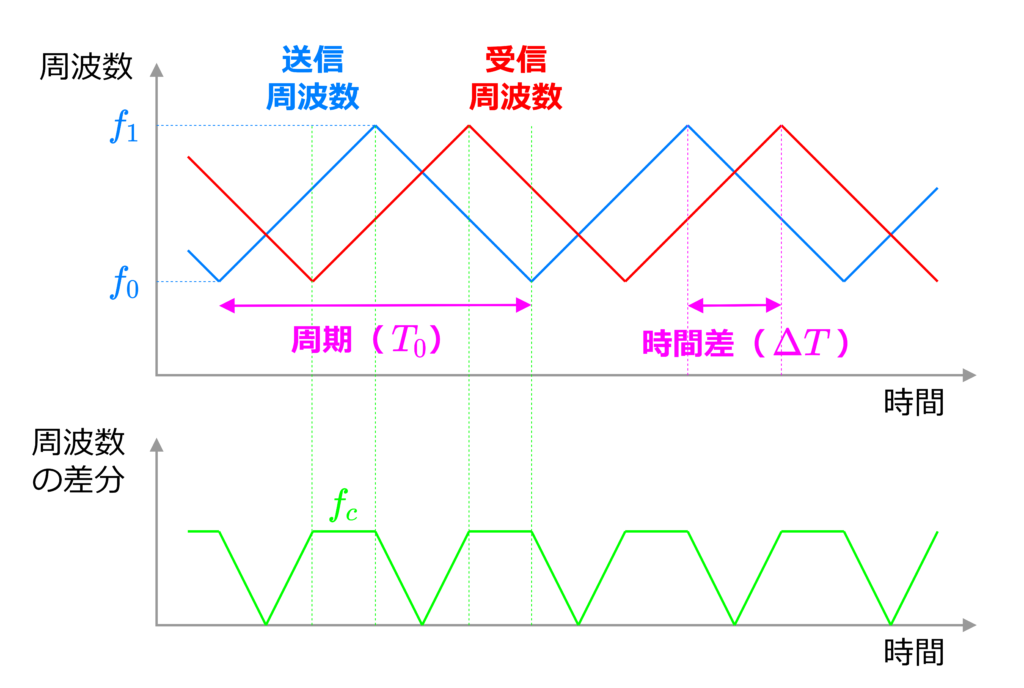
図の下のグラフのように、送信と受信の周波数の差分の絶対値をとった値を算出し、それが一定になる時間帯の値(\(f_c\))を見つけます。これが送信と受信の時間差に相当し、下記の関係式が成り立ちます。
$$~~\Delta T = \frac{T_0 \times f_c}{2(f_1-f_0)}$$
この数式の求め方は人によって好みがあるかと思いますが、例えば底辺が \(T_0/2\) の直角三角形と底辺が\(\Delta T\) の直角三角形を見つけて、それぞれの傾きが等しくなる、という計算方法だと下記のような途中式になります。
$$~~\frac{(f_1-f_0)}{(T_0/2)} = \frac{f_c}{\Delta T}$$
あとは TOF センサーの原理に基づいて、\(\Delta T\) から距離 \(R\) が求まります。
$$~~R = \frac{ΔT \times c}{2} = \frac{T_0 \times f_c}{2(f_1 – f_0)} \times c \times \frac{1}{2}$$
$$~~~~= \frac{T_0 \times f_c \times c}{4(f_1 – f_0)}$$
なお、連続的に周波数を変化させた波形のことを「チャープ波形」や「チャープ信号」と呼びます。これは電波以外の他の技術分野でも一般的に使われる言葉です。チャープ波形を縦軸に強度をとったグラフで表現すると下図のようになります。
周期が短くなったり、長くなったりするような波形です。実際よりも周波数の変化を大きめに誇張して描いていることに注意してください。また、変化させる周波数の範囲は、前述のように法令で定められている周波数帯に収まる程度となります。
FMCW方式には、対象物までの距離だけでなく相対速度を求めることができるという特徴があると前述しました。この機能を理解するためには、周波数の波形のグラフをもう少しリアルに考える必要があります。電波は「波」の一種ですので、波を放射する物体と波を受ける物体が別の速度で動く場合には「ドップラー効果」が起き、周波数が変化します。つまり、対象物がレーダーを搭載するロボット(自動車)から離れていけば、受信する周波数が低くなり、逆に対象物が近づいてくれば受信する周波数が高くなります。このドップラー効果による周波数の変化を検知することで、相対速度を求めることができます。ドップラー効果を加味した場合の周波数の波形は下図の通りです。この図は、前方の対象物の速度がレーダー自身よりも遅く近づいている状態を想定したものです。
ドップラー効果による周波数のシフト量 \(f_d\) は、レーダーと対象物の間の相対速度と下記のような数式の関係になります。
$$~~f_d = \frac{2 \times v \times f_c}{c}$$
この数式は、電磁波のドップラー効果の式から導くことができます。送信する電波の周波数を \(f_a\)、受信される周波数を \(f_b\)、レーダーと対象物の相対速度を \(v\)、光速を \(c\) とすると下記のようになります。
$$~~f_b = \frac{\sqrt{1-(\frac{v}{c})^2}}{(1-\frac{v}{c})} f_a$$
音波の場合のドップラー効果とは異なる式になることに注意が必要です。電磁波の場合は、信号の進行速度が「光速」となります。相対性理論に基づくと、光速は観測者の速度によらず一定になるという不思議な性質があります。(音波の場合、信号の進行速度である「音速」は観測者の速度によって変わります。)この性質から、数式の形が音波と比べて若干異なります。
この式をテーラー展開を使った近似計算で変形していきます。相対速度 \(v\) は光速に比べて十分小さい、つまり \(v/c \ll1\) を仮定して近似します。
$$~~f_b = \frac{\sqrt{1-(\frac{v}{c})^2}}{(1-\frac{v}{c})} f_a$$
$$~~~~\simeq \sqrt{1-\left(\frac{v}{c}\right)^2}\left(1+\frac{v}{c}\right)f_a$$
$$~~~~\simeq \left(1-\frac{1}{2} \left(\frac{v}{c}\right)^2\right)\left(1+\frac{v}{c}\right)f_a$$
$$~~~~\simeq \left(1-\frac{1}{2} \left(\frac{v}{c}\right)^2 + \frac{v}{c} -~ \frac{1}{2} \left(\frac{v}{c}\right)^3\right)f_a$$
$$~~~~\simeq \left(1 + \frac{v}{c}\right)f_a$$
周波数の変化量 \((f_b – f_a)\) は下記のようになります。
$$~~f_b – f_a \simeq \left(1 + \frac{v}{c}\right)f_a- f_a = \frac{v \times f_a}{c}$$
レーダーの場合、レーダーから物体、物体からレーダーというようにドップラー効果(ドップラーシフト)が2回発生しますので、周波数の変化量は 2 倍となります。つまり、最終的にレーダーの受信部分で観測される周波数の変化量 \(\Delta f\) は下記です。
$$~~\Delta f = \frac{2v \times f_a}{c}$$
この \(\Delta f\) は前図の下のグラフにある \(f_{up}\) と \(f_{down}\) を計測することで求めることができます。
$$~~\Delta f = \frac{f_{down}-f_{up}}{2}$$
これから、相対速度 \(v\) が求まります。
$$~~v = \frac{\Delta f \times c}{2f_a} = \frac{(f_{down} – f_{up}) \times c }{4 f_a}$$
\(f_a\) は送信回路内で生成される周波数ですので既知です。光速も既知ですので \(f_{down}\) と \(f_{up}\) を計測できれば相対速度 \(v\) を知ることができます。以上のように、距離と一緒に相対速度も測定できることが FMCW 方式の特徴です。
ちなみにドップラー効果を考慮して距離を計算するには、下記の式によって距離を求める際に使う fc を求めればよいです。
$$~~f_c = \frac{f_{down} + f_{up}}{2}$$
回路構成(FMCW方式)
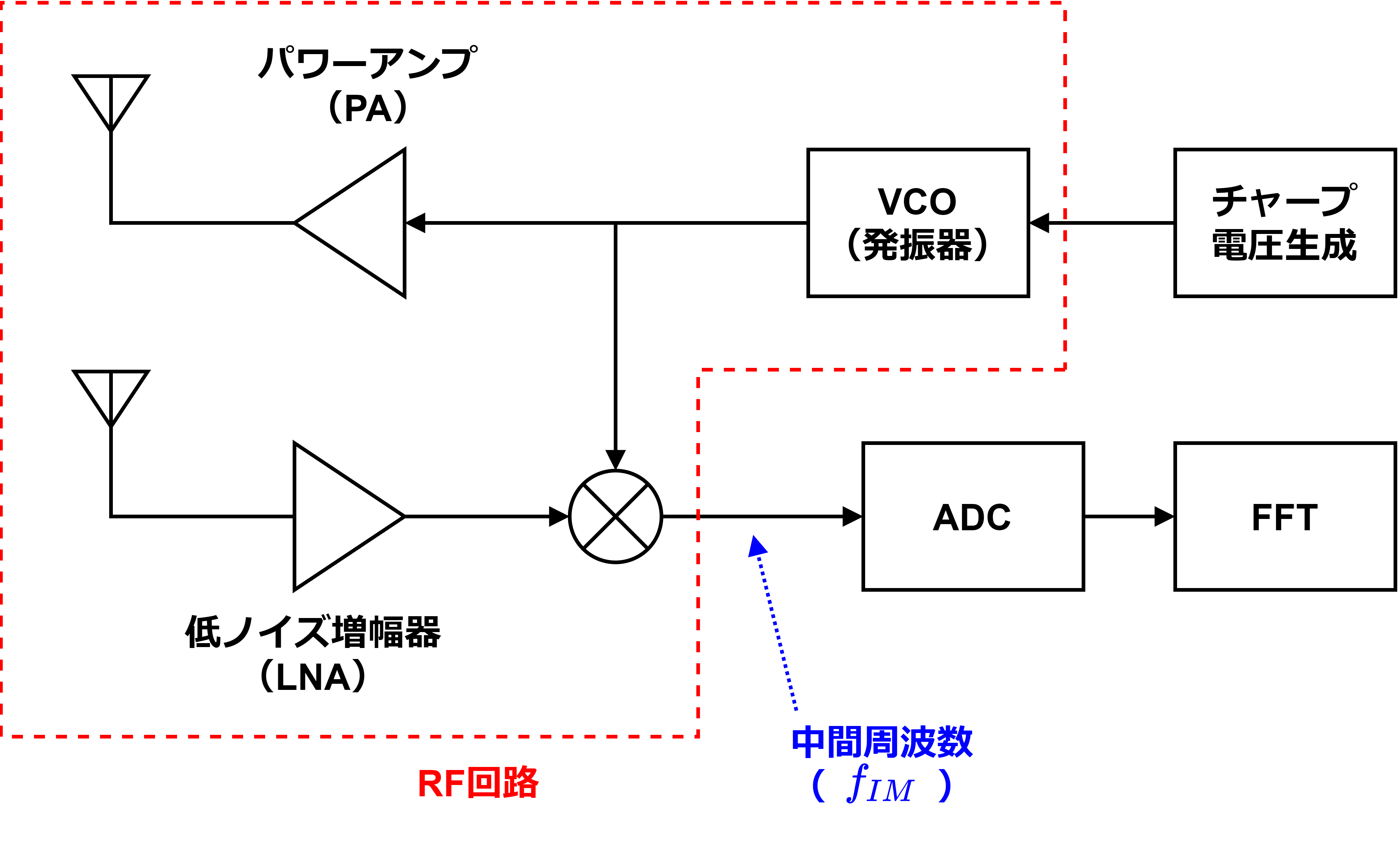
次に、FMCW 方式の回路構成を示します。基本的な構成は一般的な無線通信システムと同様ですが、送信のチャープ信号をそのまま受信側でも使う点などが異なります。構成図は下図の通りです。
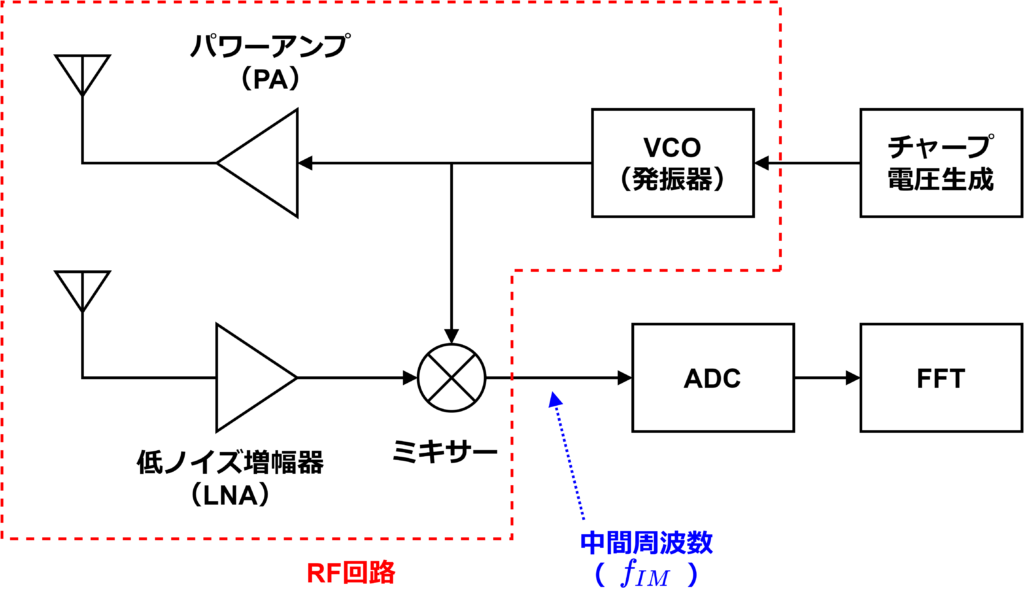
送信側は、チャープ信号を生成する「発振器」、アンテナから十分な強度の電波を出力できるように電力を増幅する「パワーアンプ」、そして「アンテナ」で構成されます。サイン波を生成する発振器には、周波数を変化させる機能を持つ「VCO(Voltage Controlled Oscillator)」が使われます。VCO は入力電圧に応じて周波数を制御できるという機能を持っています。入力電圧を直線的に上げ下げすれば、チャープ波形が得られるというわけです。
受信した電波は、まずは「アンテナ」で電圧信号に変換されます。この電波の電力は非常に微弱で、電圧値も小さな値となります。この電圧信号を「LNA(Low Noise Amplifer)」という増幅器を使って低ノイズで効果的に増幅します。この信号は例えば 76GHz の周波数のサイン波だったりします。この周波数で電波を送信したり受信したりして情報を運ぶわけですね。そういう意味で、電波の周波数のことを「キャリア(運び屋)」と呼びます。(Docomo などの携帯電話の会社をキャリアと呼ぶことがありますが、それと同じ意味です。)そして、このキャリアの周波数で処理する回路のことを「RF 回路」もしくは「高周波回路」と呼びます。キャリアの周波数のことを RF と呼ぶこともあります。RF は Radio Frequency の略で電波の周波数という、そのまんまの意味です。
このキャリア周波数から、ドップラー効果でシフトした \(f_{down}\) と \(f_{up}\) の周波数を取り出します。サイン波の周波数を計測する手法として「FFT(高速フーリエ変換)」という有名な手法があり、ミリ波レーダーでも FFT を使用します。FFT はサンプリングされた(等間隔の離散時間のデータに変換された)デジタル信号を対象としますので、アナログ信号であるRF 信号を AD 変換する必要があります。AD 変換を行う ADC のサンプリングレートは高くてもせいぜい 数 Gsps(数 GHz)ですので 76 GHz 等の高周波のサイン波を扱うことはできません。(標本化定理により、76 GHz のサイン波に対しては 2 倍の 152 GHz のサンプリングレートが必要となります。)
そこで、無線通信システムの一般的な作法にもとづいて、ミキサーによって一旦サイン波の周波数を下げてから AD 変換を行います。ミキサーは、図の記号から連想されるように信号(波形)同士を掛け算するアナログ回路です。ミリ波レーダーの受信部では、送信のサイン波と受信のサイン波を入力します。送信の周波数を前出の数式の通り \(f_a\) として、受信の周波数を \(f_b\) とすると、ミキサーの出力の波形は下記の数式となります。これは三角関数の公式によるものです。
$$~~sin(~ 2 \pi f_a t ~) \times sin(~ 2 \pi f_b t ~) $$
$$~~~~=\frac{1}{2}\left(~ sin(~ 2 \pi ~(f_a + f_b)~ t ~) + sin(~ 2 \pi ~(f_b -f_a)~ t ~)~\right)$$
第1項の \((f_a + f_b)\) の周波数のサイン波は、RF 周波数の約 2 倍の周波数です。これでは RF 回路でも周波数が大きすぎて処理しきれず、信号は減衰してとても小さくなります。実質的にローパスフィルタの効果が働くわけです。その結果、第2項の \((f_b – f_a)\) の周波数のサイン波だけが残り、これが実質的なミキサーの出力となります。\((f_b – f_a)\) はチャープ信号の周波数の幅です。76 GHz 帯の場合は 1GHz 以下となり、AD 変換が可能なレベルです。このように無線通信システムでは必要な演算処理を比較的容易に実行できるように、サイン波の周波数を中間周波数(IF、Intermediate Freqency)に落とすことが一般的です。(これをスーパーヘテロダイン方式と呼ぶこともあります。)以上で、送信と受信の周波数の差分の \((f_b – f_a)\) を測定できたことになります。
ミリ波レーダーの性能
測距センサーの重要な性能指標に2つの「分解能」があります。「距離分解能」と「角度分解能」です。ここでの分解能とは、2つの物体が視野内に存在した時に、2つの物体同士がどのくらい離れていれば1つに見えずにきちんと2つにあると認識できるか(2つに分解できるか)という意味を示します。人間の「視力」みたいなものです。人間の視力の定義は角度分解能で、視力 1.0 は 1 分(1/60 度)の分解能に相当します。
距離分解能
FMCW方式のミリ波レーダーの距離分解能の理論的な数値は次のように導くことができます。まず、ドップラー効果を考慮する前に導いた距離 \(R\) の関係式が \(f_c = f_b – f_a\) と比例関係にあったことを思い出します。この関係から、\(f_c\) の分解能によって \(R\) の分解能が決まることが分かります。\(f_c\) は FFT によって計測されます。FFT で周波数を計測するということは、ざっくりと言うと、一定の期間の間にサイン波が何個含まれるのかを数えることに相当します。個数の最小単位は 1 個です。つまり、周波数の計測期間 \(T_0/2\) で周波数 \(f_c\) のサイン波が1個以上ないと \(f_c\) はゼロとして認識されます。もしくは、現実世界で検出対象の物体の距離が変化したとしても、サイン波1個以上の差が出来なければ距離の変化を認識できない、ということになります。このことを数式で表現すると下記のようになります。サイン波の個数は周波数と期間の掛け算で求まるということを使います。
$$~~f_b \times T_0 – f_a \times T_0 = \frac{fc_ \times T_0}{2} > 1$$
$$~~f_c > \frac{2}{T_0}$$
距離 \(R\) と \(f_c\) の関係式は
$$~~f_c = \frac{R \times 4(f_1 – f_0)}{T_0 \times c}$$
であることから、前述の式に代入して下記になります。
$$~~\frac{R \times 4(f_1 – f_0)}{T_0 \times c} > \frac{2}{T_0}$$
$$~~R > \frac{c}{2(f_1 – f_0)} $$
これが、距離の分解能を表現する式です。\(f_1 – f_0\) を無線通信で利用する周波数の幅という意味で「帯域」と呼ぶことがあります。76GHz 帯で利用可能な最大の帯域は 1GHz なので距離の分解能は 0.15m (15cm) となります。79GHz 帯の最大の帯域は 4GHz で距離の分解能は 3.75cm です。いずれも、自動車向けでは十分なレベルだと思います。駐車動作を行う際には、15cm の分解能は物足りないですが、近距離では超音波センサーを使ってもっと高精度に距離を測定したりすることから、ミリ波レーダーに求められる性能はこれで十分です。
実際には、対象物以外の物体からの反射によるノイズ、回路の精度やノイズといった性能劣化の要因が加わりますので、この数値よりも大きくなってしまうことがあります。実際のミリ波レーダー製品の距離分解能は、数 cm ~ 数十 cm 程度になるようです。
角度分解能
ミリ波レーダーで対象物の水平方向や垂直方向の位置を検出するためには、送信アンテナと受信アンテナを複数並べることが必要となります。下図のように、アンテナごとに対象物から反射して返ってくる電波の「位相」が異なることを利用して位置を推定します。なお、送受信のアンテナを複数並べてアンテナごとに別の信号を扱う技術や構成のことを MIMO(Multi Input Multi Output)と呼びます。
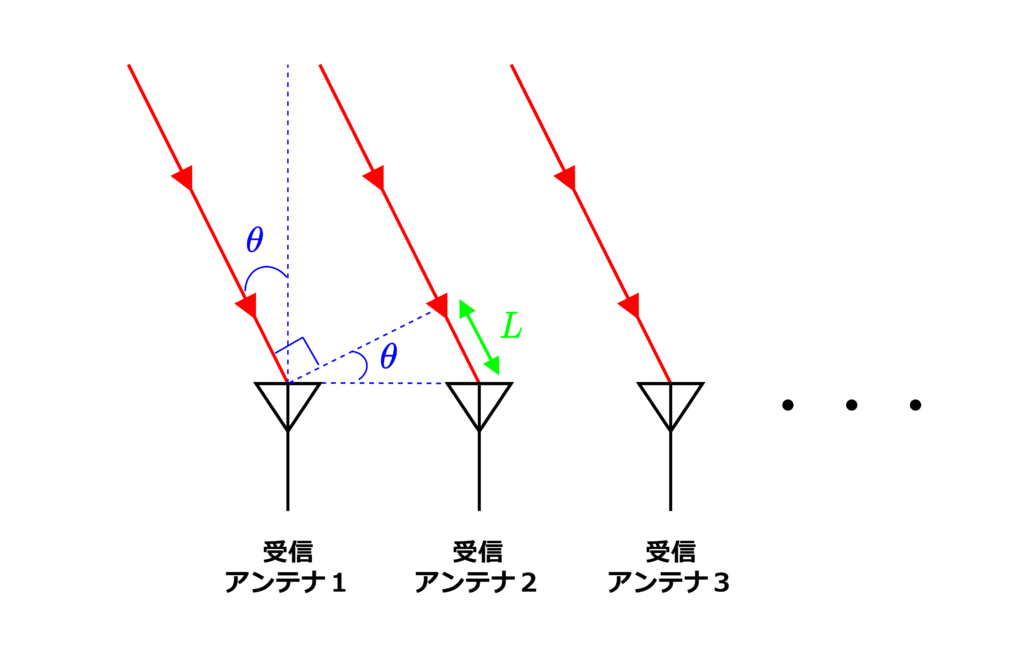
測距センサーでは、水平・垂直方向の位置は角度として表現されます。そこで、まずは前図を参考にしながら角度の算出方法を整理します。対象物からの反射波の進行方向の角度を \(\theta\)、受信アンテナ同士の距離を \(d\)、位相差を \(\phi\)、電波の波長を \(\lambda\) とおきます。\(\theta\) が求めたい角度情報です。これらの変数を使って図中の \(L\) の長さを表現すると下記のようになります。簡単な三角関数と幾何学の計算です。
$$~~L = d~sin(\theta)$$
これと位相差の関係は下記です。
$$~~\phi = \frac{2 \pi \times L}{\lambda} $$
\(L\) を代入すると次のようになります。
$$~~\phi = \frac{2 \pi \times d~sin(\theta)}{\lambda} $$よって、\(\theta\) は下記のように求まります。
$$~~\theta = sin^{-1}\left( \frac{\phi \times \lambda}{2 \pi d}\right)$$
次に、角度分解能を考えます。前の数式の通り、角度 \(\theta\) は位相差 \(\phi\) から求めます。位相差の計測方法はいくつかありますが、ここでは FFT を利用するケースを想定します。FFT の出力形式としてよく使われるのは、横軸に周波数、縦軸に強度を対応させたグラフですが、フーリエ変換の原理では、横軸に位相、縦軸に強度を対応させたグラフも出力可能です。(変換対象が無限に続くサイン波の重ね合わせであれば、フーリエ変換で計算される情報は、時間軸方向の波形情報に対して「可逆」で位相情報も含んでいるのです。)FFT における位相方向のデータ点の数は、アンテナの個数(\(N\))で決まります。位相の範囲は 0~\(2\pi\)(0~360°)ですので、位相差 \(\phi\) の分解能 \(\Delta \phi\) は下記になります。
$$~~\Delta \phi = \frac{2 \pi}{N}$$
前出の式から、\(\Delta \phi\) と角度分解能 \(\Delta \theta\) は下記の関係となります。
$$~~\frac{d \phi}{d \theta} = \frac{2 \pi d~cos(\theta)}{\lambda}$$
$$~~\frac{\Delta \phi}{\Delta \theta} = \frac{2 \pi d~cos(\theta)}{\lambda}$$
$$~~\Delta \theta = \frac{\Delta \phi \times \lambda}{2 \pi d~cos(\theta)} $$
$$~~~~= \frac{2 \pi}{N} \times \frac{\lambda}{2 \pi d~cos(\theta)}$$$$~~= \frac{\lambda}{N \times d~cos(\theta)}$$
一般的に、受信アンテナ間の距離 \(d\) は \(\lambda/2\) 程度に設定することが多いので、\(d = \lambda/2\) を仮定します。
$$~~\Delta \theta = \frac{2}{N~cos(\theta)}[rad]$$
これが角度分解能の式です。この式の単位はラジアン(rad)です。前方方向(\(\theta=0\))の角度分解能は
$$~~\Delta \theta = \frac{2}{N}$$
となります。例えば受信アンテナが 16 個あった場合の角度分解能は 0.125 rad( 7.2°)となります。
この式から分かることは、アンテナの個数が多ければ多いほど、角度分解能が向上するということです。物理的にアンテナの個数を増やすは難しいため、送信アンテナも複数設置して、仮想的に受信アンテナの個数を増やすということをします。これが MIMO です。
実際のミリ波レーダー製品の角度分解能は、高精度なもので約 1 °です。例えば障害物が前方 100m の距離にある場合、1°は水平(垂直)方向の 1.7 m に相当します。自動車の場合を考えますと、少し大きめの自動車の車幅くらいです。高速道路で前方車への追随走行(オートクルージング)であればこれで十分とされています。一方で、一般道路では、障害物がもっと複雑になってきますので、これでは不足です。0.1°程度(人間の視力で 0.1~0.2)は欲しいところです。ミリ波レーダーは天候の影響を受けにくいことから、遠方の障害物を検知する目的で利用されることが想定されていますが、角度分解能が低いために LiDAR 等の別の測距センサーを併用することが必要になると言われています。
ミリ波レーダーなどのセンサーの勉強におススメの本の書評はこちら
