超音波センサーの概要
超音波センサーは、移動系ロボットで障害物を検知するために広く使われています。また、自動車の低速時の自動ブレーキや障害物の警告といった機能でも使われています。自動運転機能を実現するための障害物検知の有力なセンサーとして期待されているミリ波レーダー、LiDAR、ステレオカメラに比べますと、超音波センサーは対象物の位置の推定精度は劣ります。それでもコンパクトで安価ということから、自動運転自動車などの自律走行ロボットで低速時に近距離の障害物を検出するという用途で積極的に採用されています。技術者にとっては把握しておくべき重要なセンサーの1つです。
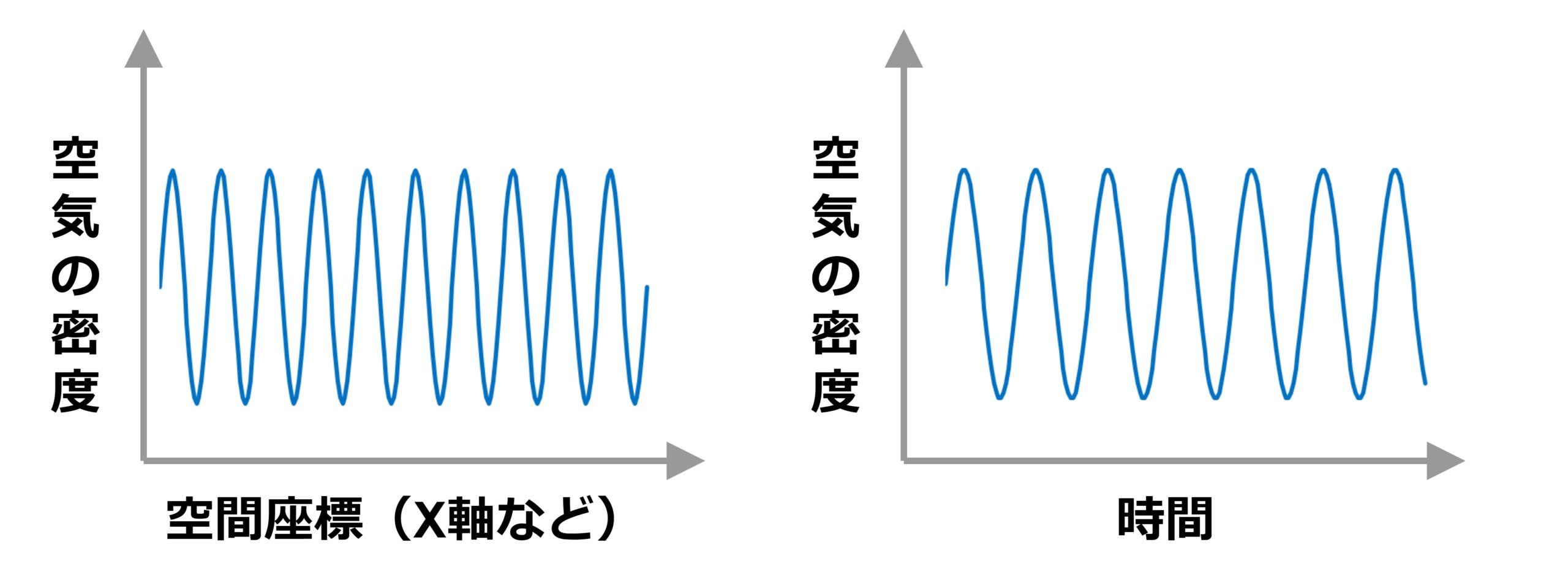
超音波センサーは、超音波という音波の一種を使って障害物を検出するセンサーです。音波は、いわゆる「音」のことです。音(音波)は、空気中を伝わる波です。空気の密度が低い部分と高い部分が繰り返される形で伝播していきます。これは「粗密波」と呼ばれ「縦波」に分類されます。下図(左)のように、空気の密度を縦軸にとって、空間の位置を横軸にとったグラフで表現するとサイン波の形になり、波であることが分かります。また、下図(右)のように、横軸に時間をとってもサイン波になります。
超音波は、音波の中で人間の可聴域よりも高い周波数のものをさします。人間の可聴域は 20kHz 以下ですので、20kHz 以上が超音波の領域です。この領域の音波を使って障害物の有無を検知するのが超音波センサーです。ただし、超音波の周波数には厳密な定義がありません。40kHz 以上とされているケースもあって様々です。原理的には、可聴域の音波を利用したセンサーを作ることもできるのですが、それではセンシングの動作の度に音が聞こえてしまって煩わしいということから、人間への影響を抑えるために超音波の領域が使われます。なお、犬などの動物によっては、可聴域が広く 20kHz 以上の音が聞こえることもありますので、マージンをとって 40kHz 以上とか 100kHz 以上を使うなどの配慮がなされることもあります。
超音波センサーの基本的な機能と構成
超音波センサーは測距によって障害物の検知するセンサーです。対象物までの距離を測定し、距離が近ければ障害物が存在すると認識します。測距センサーには、対象物の距離のみという1次元の情報を出力するもの、対象物までの距離と水平方向の角度という2次元の情報を出力するもの、さらに垂直方向の角度を加えた3次元の情報を出力するものがあります。自動運転自動車などの自律走行ロボットで多く使われるのは、1次元の情報を出力するタイプです。
船舶では、超音波センサー(ソナー)で障害物や魚群の位置情報を2次元や3次元の形式で取得することもあります。このためには、超音波の送信部を機械的に回転させる必要があり、低コストでコンパクトという超音波センサーのメリットが失われてしまいます。そういった理由で地上の移動系ロボットでは採用されません。そこまでするなら、撮像能力を持った LiDAR を使った方がよいという判断がなされます。
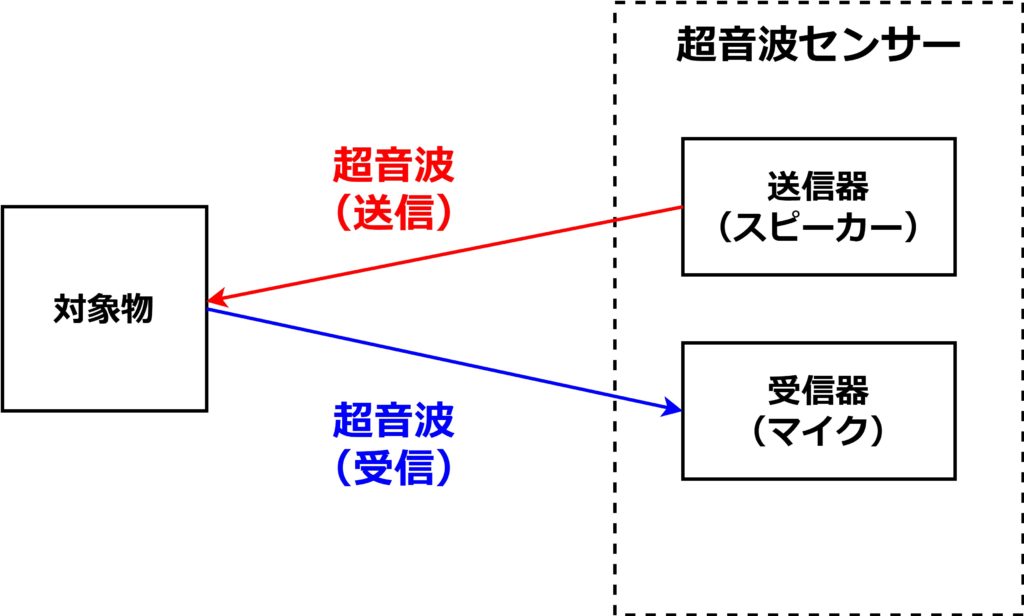
超音波センサーの基本的な構成は下図の通りです。超音波を送信する送信部と受信する受信部によって構成されます。超音波を送信し、対象物にあたって返ってきた超音波を受信して、送信から受信までの時間差を測定することで距離を推定します。直観的に想像できると思いますが、対象物までの距離が大きいほど時間差も大きくなります。
距離を推定する際に使う数式を導いてみます。対象物までの距離を \(R\)、時間差を \(\Delta T\)、超音波の速度(音速)を \(c\) とおきます。送信して、対象物にあたって返ってくるまでに、音波はセンサーと対象物の間を往復します。音波の飛行距離が往復で \(2R\) になることを考慮すると、下記の式が成り立ちます。
$$~~2R = \Delta T \times c$$
$$~~R = \frac{\Delta T \times c}{2}$$
このように、\(\Delta T\) から距離 \(R\) を求めることができます。ただし、ここで音速 \(c\) について注意が必要です。音速は、空気の温度によって変化するという点です。そのため、超音波センサーには、温度センサーを搭載するか、何らかのキャリブレーションの仕組みを入れることが必要となります。
超音波センサーの原理
超音波センサーは、前述の図で示したように、超音波の送信器と受信器によって構成されます。超音波は「音」の一種ですので、送信器はスピーカーで、受信機はマイクに相当します。一般的なスピーカーは、磁石とコイルで構成され、動作原理はフレミングの左手の法則にもとづきます。はじめに、電気回路を使って、音として出力したい情報を電気信号で表現しておきます。この電気信号に応じた電流をコイルに流すと、磁石による磁場の影響から力が発生します。この力によってスピーカーの内部の振動板を揺らして空気の粗密波を生成し、それが「音」となります。マイクはその逆の反応をたどります。音によって振動板が揺れてコイルに電流が流れ、その電気信号を電気回路へと伝えます。
超音波センサーの場合、通常の音よりも速い周波数の振動を扱わないといけないということと、一般的なスピーカーやマイクに比べて周波数特性にこだわらなくてもよいということから、コンパクトな構成が採用されています。すなわち、超音波センサーの送信器と受信器では、圧電(ピエゾ)素子というセラミックスで形成されるデバイスを利用します。この素子の性質は「誘電体」で、力と電場を双方向に変換するという機能を持ちます。磁石やコイルを使わずに1つの固体で変換を実現するため、コンパクトで安価に作ることできるというメリットがあります。可聴域向けのスピーカーやマイクに比べると周波数特性はよくない(歪みやノイズが大きい)ものの、障害物までの距離を測定するという用途では十分な特性を持っています。
簡易的な超音波センサーでは、前出の図のように、送信用と受信用のピエゾ素子を別々に用意して2つ並べて設置します。一方で、送信器と受信器が同じ圧電素子であることから、両者を共有して、信号を時分割で処理するという構成をとることもあります。時分割で処理するために回路がやや複雑になるというデメリットはありますが、センサー全体をコンパクトに作ることができるという大きなメリットもあります。なお、このように電圧と超音波の変換を行うピエゾ素子のことを「トランスデューサ」と呼びます。トランスデューサの構造と動作原理を下図に示します。
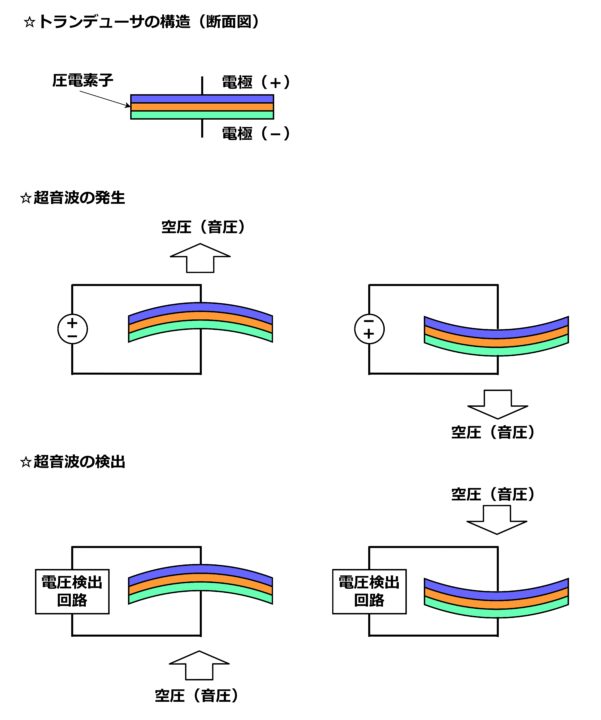
薄く作った圧電素子の上側と下側にそれぞれ「+」と「ー」の電極を貼り付けます。この電極に与える電圧によって、圧電素子は上側に反ったり下側に反ったりします。電極にサイン波のように変動する電圧を与えることで、圧電素子が上下に振動します。これによって周囲の空気への圧力が変動して空気の密度の変化が生じ、音波となります。以上が圧電素子で超音波を送信するメカニズムです。
電極に電圧を与えずに(インピーダンスが高い状態にして)電極の電圧を測定できるようにしておくと、今度は音波によって圧電素子が変形して電圧の変化が生じます。この電圧の波形を取得して分析することで音波を検出することができます。これが圧電素子で超音波を受信するメカニズムです。
超音波センサーの回路構成
超音波センサーは下図のような回路構成をとります。ここでは、トランスデューサを送信用と受信用にそれぞれ別に用意するケースを示します。送受信で兼用する場合には、スイッチを設置してタイミングよく切り替えるという制御を行います。
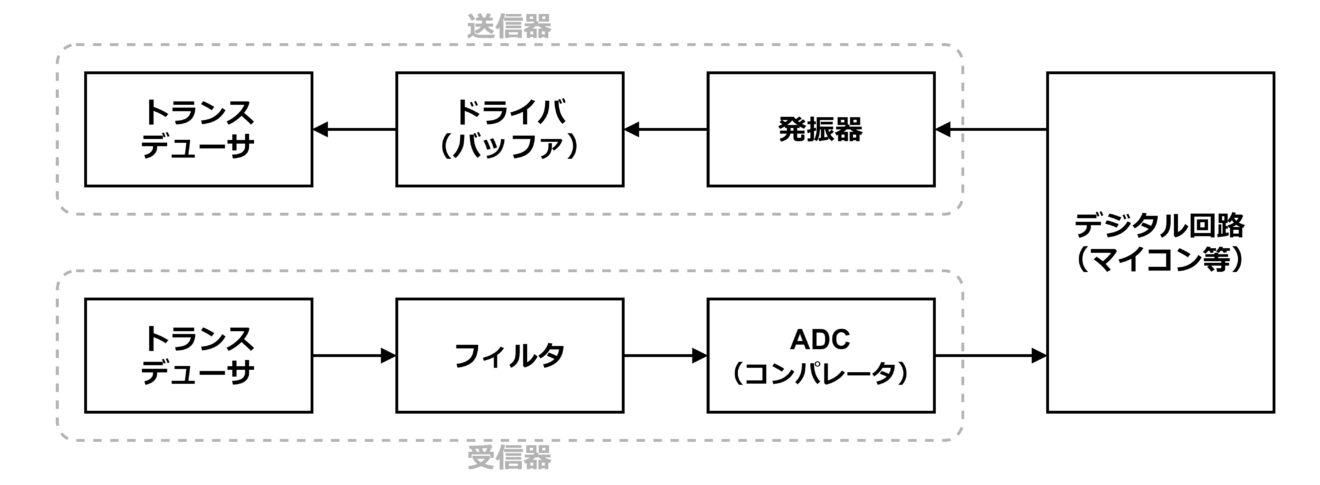
送信器では、変動する電圧をトランスデューサに与えるための発振器が必要となります。最終的に生成する音波はサイン波となりますので、発振器でもサイン波を生成します。一般的な発振器は出力する電力が低い(ドライブ能力が低い)ために、トランスデューサを十分に揺らすことができません。トランスデューサは前出の図のように電極で絶縁体である圧電素子をはさむ構造をとっていてそれなりの寄生容量が存在します。これが出力回路にとって負荷容量となります。(容量値は大よそ nF オーダーになるようです。)そこで負荷容量をドライブするためのドライバ(アナログバッファ)が必要になります。
一方で、製品によってはサイン波ではなく矩形波を発振器で生成することもあります。サイン波のようなアナログ波形をドライバ回路でバッファしようとすると、出力に反映されない内部的な消費電力が比較的大きくなり、電力効率が悪くなる可能性があります。入力されたアナログ波形をできるだけ形を変えることなく綺麗に出力しようとすると、A級アンプやAB級アンプのように常時電流を流し続けるようなアナログ回路が求められます。そういった状況を避けるために矩形波を選択するというわけです。矩形波の場合、ドライバにはモーター制御でも利用される H ブリッジ回路などを使います。H ブリッジ回路は 4 つの半導体スイッチで構成される回路です。矩形波は2値の電圧で表現されますので、スイッチだけで実現可能なのです。スイッチであれば、アナログ回路に比べてかなり消費電力を抑えることができます。
一方で、矩形波をトランスデューサに入力すると音波も矩形波になるのでしょうか?トランスデューサは、高い周波数には反応しないローパスフィルタのような性質を持っていますので、矩形波の高調波成分はそぎ落とされ、音波はほぼサイン波の形になります。高調波成分の電力が無駄になりますが、アナログ波形向けのドライバ回路の内部消費電力よりも少なくすむはずです。
なお、電波の場合には高調波成分の電力の上限が法令で決まっていますが、超音波は明確に決まっていません。日本では、超音波の出力電力が 50W 以上になる場合に届け出が必要になるという程度のルールしか存在しませんので、矩形波を扱う場合でも特段の配慮は必要ありません。(一般的な超音波センサーの出力電力は数 W 程度です。)
また、トランスデューサの等価回路は厳密には LCR 回路となり、ゲインが増大する共振周波数が存在します。共振周波数はトランスデューサの構造で決まります。トランスデューサの構造は、出力したい超音波の周波数と共振周波数が出来るだけ近くなるようにを決定する必要があり、超音波センサーの各メーカーはそうなるように製品設計しています。
受信器は、送信した超音波と同じ周波数帯を取り出すためのフィルタ、AD 変換や電圧比較をしやすくするために電圧の幅を大きくするための増幅回路、ADC(コンパレータ)によって構成されます。特定の周波数の超音波の存在の有無を検知できさえすれば、TOF の原理によって送受信の時間差から対象物までの距離を算出できますので、基本的にはコンパレータがあれば十分です。一方で、ADC によって電圧の波形を細かくデジタル信号に変換しておけば、高度なフィルタリングの処理が可能になって、検出の感度や測定距離の精度を上げることができます。どこまで性能にこだわるかで、ADC を採用するか、コンパレータですませるかを選択することになります。
送信器と受信器の間では、超音波の送信と受信のタイミングを合わせる必要があり、これをマイコンなどのデジタル回路が担います。発振器から信号が出力されるタイミングからカウンタ(タイマー)を回しはじめ、受信が検出されたらストップし、TOFのための飛行時間を計測します。また、受信が確認されるまで、あるいは決められたタイムアウト時間になるまで送信器から超音波を送信しないように制御します。
超音波センサーの性能
距離分解能
超音波センサーの距離分解能は、送信する音波の波長と ToF の時間計測の精度のいずれかの悪い値になる方(距離分解能が粗くなる方)で決まります。まず音波の波長から考えてみます。波長 \(\lambda\) は下記の計算式から求めることができます。
$$\lambda = \frac{v}{f}$$
ここで \(v\) は音速(音波の伝搬速度)、\(f\) は超音波の周波数を表します。空気中の音速は、摂氏 15 度の温度で 340m/s です。超音波の周波数を仮に 40kHz とすると波長は 8.5mm、100kHz では 3.4mm となります。例えば運転支援機能付きの自動車や自律走行ロボットで障害物を検知するための精度としては十分でしょう。
次に、ToF の時間計測の精度を考えます。ToF の原理に基づくと、前述の通り、超音波の送信から受信までの時間差と音速から対象物までの距離を測定できます。そのため、時間差の計測誤差がそのまま距離の誤差になります。音速 \(v\) が 340m/s で計測時間の誤差 \(\Delta T\) が 1us の場合、測定誤差(距離分解能)\(\Delta R\) は下記のような計算式で求まります。
$$\Delta R = \frac{\Delta T \times v}{2} = \frac{1[us] \times 340[m/s] }{2} = 170 [um]$$
非常に小さいスケールで、距離分解能としては十分すぎる性能です。計測時間の精度は、デジタル回路のカウンタのクロック周波数(クロック周期)で決まります。この計算式ではクロック周波数を 1MHz として仮定しています。クロック周期はその逆数の 1us となり、これが時間精度となります。最近のデジタル回路やマイコンのクロック周波数は遅いものでも数十 MHz 程度のスピードがありますので、1MHz は相当保守的な仮定です。
このように、遅いデジタル回路でも十分な距離分解能が得られることが、超音波を媒体にして測距を行うメリットです。LiDAR やミリ波レーダーのように、電磁波を媒体とした測距センサーでは、電磁波の速度(つまり光速)が速すぎることがネックになります。電磁波の場合には、前述の計算式の \(v\) の部分に光速 (\(3 \times 10^8 m/s\)) を代入することになりますが、音速 (\(3.4×10^2 m/s\)) と比べると \(\Delta R\) への影響が \(10^6\) 倍も異なります。つまり、超音波センサーは、LiDAR やミリ波レーダーに比べて、デジタル回路のスピードに \(10^6\) 倍も余裕があることになります。結果的に超音波センサー向けのマイコン等の半導体(LSI)は、安価で消費電力が小さくコンパクトなものを選べることになり、それがそのまま超音波センサー自体のメリットにつながります。
以上のことから、超音波センサーの距離分解能は波長で決まり、数 mm 程度のスケールとなります。
角度分解能
単純な ToF 方式の超音波センサーの角度分解能は、超音波の指向性によって決まります。超音波のような「波」は、回折現象によって広がってしまいます。波の発信源をコンパクトに作って、波の出口(開口部)を小さく絞ったとしても、どうしても拡散してしまうのです。どのくらいの角度に広がってしまうかは、波の波長と開口部の大きさによって決まります。広がる角度を \(\theta\)、開口部のサイズを \(D\)、波長を \(\lambda\) とすると下記の関係式が成立します。
$$\theta = \frac{70 \times \lambda}{D} ~[deg]$$
例えば、周波数 100kHz、波長 3.4mm の超音波で、開口部が 10mm の超音波センサーの場合、角度は 23.8 度となります。その他の測距センサーの LiDAR やステレオカメラでは 1 度を切る角度分解能になることを考えると、非常に大きな値(悪い値)です。周波数を高く
超音波センサーでは、LiDAR やステレオカメラのように、距離情報の画像(2次元分布)を取得するのは困難です。(作ったとしてもすごくぼやけるので、あまり役に立ちません。)それでも、自動車やロボットに搭載して前方や後方に障害物があるかどうかを判定するという機能を満たすには十分で、実際に多くの自動車とロボットで採用されています。角度分解能が悪いというデメリットを、コンパクトで安価という強いメリットが上回るのです。ただし、自動車の駐停車の動作の時など、低速時での障害物検知という限られた条件下でのみ使われます。高速走行の際には、もっと角度分解能がないと障害物との衝突を適切に回避するのは難しいでしょう。
測定可能距離
超音波センサーの測定可能距離は、最大で 10m 程度です。出力強度を大きくすれば距離を伸ばすことはできますが、前述のように自動車やロボットが低速走行している際にのみ使われますので距離を伸ばす必要性がありません。頑張って距離を伸ばしたとしても超音波は風などの空気の状態に影響を受けやすいため、長距離の検出は電磁波を媒体とするセンサーに任せるのが妥当です。