実在するロボットがどのような機能を持っているのか、大よそのイメージをまとめていきたいと思います。ロボットの機能は「知覚」「認識」「判断」「動作」の要素に分類され、この4つの要素が連動して「ロボットとしての機能」を実現します。
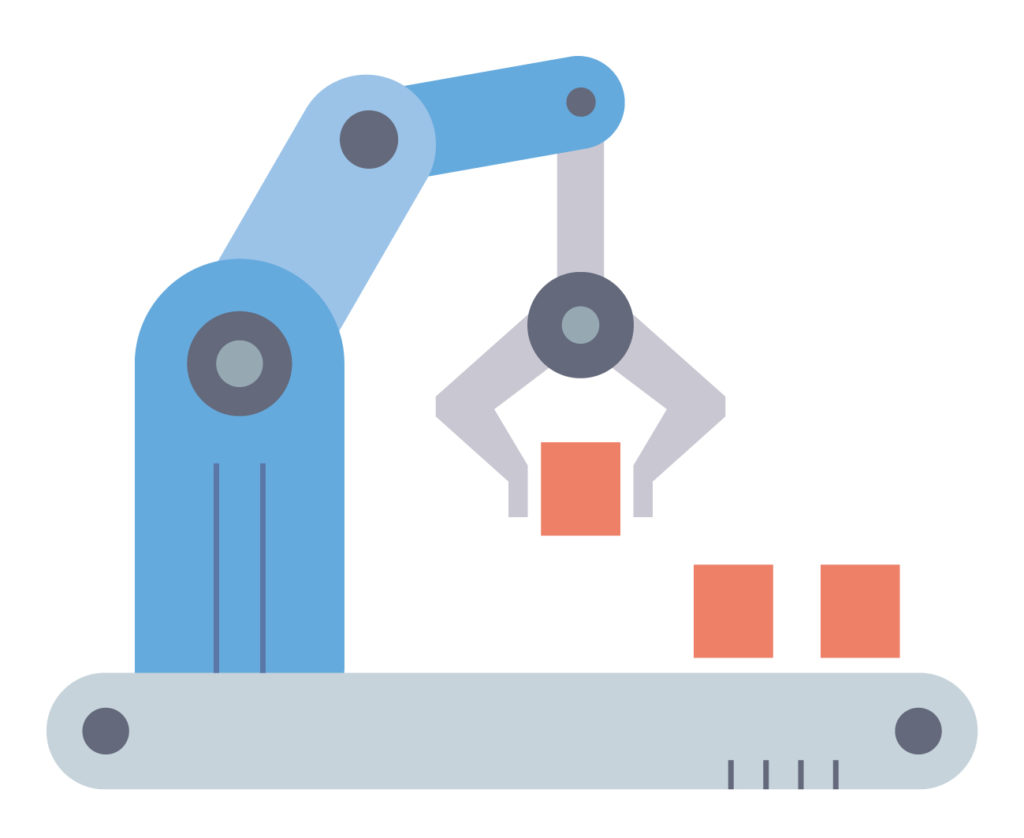
例えば、何らかの物体を掴むロボットアームを例に挙げてます。ロボットアームでは、カメラ(イメージセンサー)と距離センサーを使って物体の画像と物体までの距離を「知覚」します。知覚した情報をもとに、物体の位置・大きさ・種類を「認識」して、コンピュータでどのように掴んだらよいかを「判断」し、アームで物体を掴むという「動作」を実行する、といった流れになります。
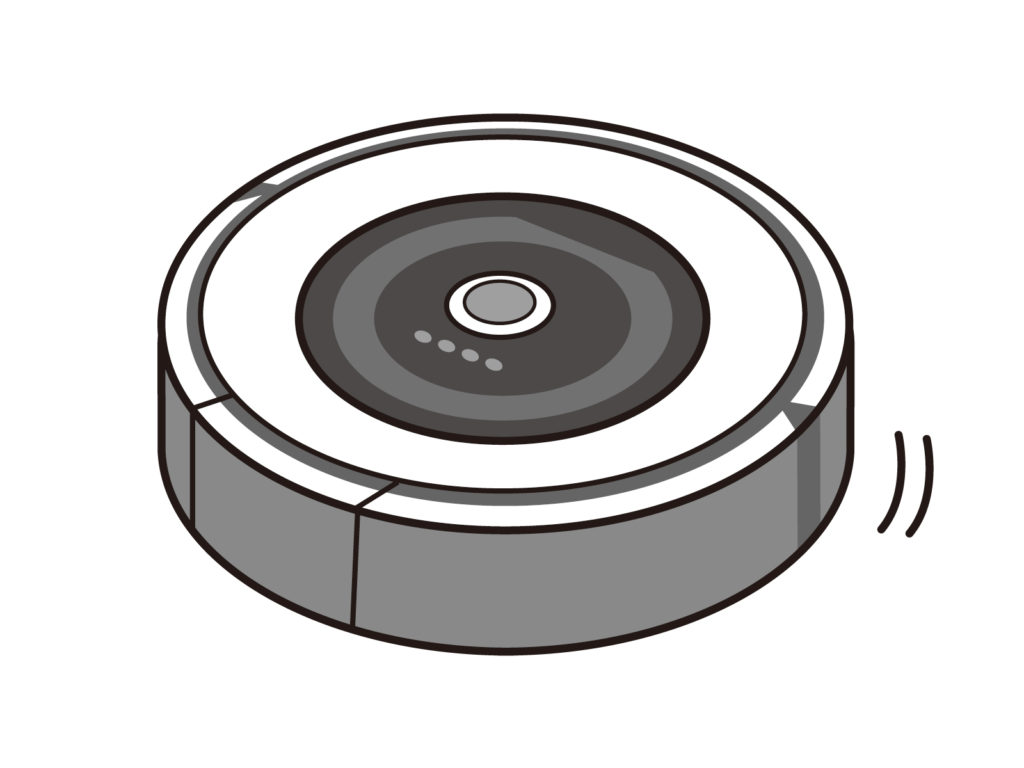
家庭用のロボット掃除機では次のようになります。はじめにセンサーを使って物体までの距離などの情報を「知覚」します。その結果をもとに前方の障害物の有無を「認識」して、コンピュータで次にどの方向に進むかを「判断」します。そして、移動と吸引という「動作」を実行する、といった感じです。
一言でセンサーといってもロボット掃除機の製品によって様々な形式があるようです。前方にある障害物の距離を測定するようなセンサーもあれば、軽く障害物にわざと当たって障害物の有無を検出するセンサーもあります。
また、階段から落ちないように段差を検出するセンサーがあったり、障害物の認識とは別に部屋の間取り(地図)の認識という機能(SLAM と呼ばれる機能)が搭載されていることも多く、なかなか奥が深いようです。この辺りはまた別項目にてまとめていきたいと思います。
最後にコミュニケーションロボットの機能の構成を見てみます。コミュニケーションロボットでは、人間の音声をマイクセンサーによって知覚し、コンピュータで発言の内容を認識します。そして、コンピュータがどのような回答を行うか判断し、スピーカーを通して回答の発話(音声出力)という動作を実行します。
高度な分析・判断を行うためにコンピュータが多くのデータや演算を必要とする場合には、無線等のネットワーク通信を経由して、別途クラウド上のサーバーに接続することもあります。通信技術を使ってコンピュータの機能を拡張している、とも言えます。
ロボットの機能の概要は以上です。今後、別のページで詳しい内容を整理していきます。世の中にどのような機能のロボットが存在するのかを把握するのに、下記の本が参考になります。一見子供向けですが、大人が読んでも勉強になります。









